







 이미지 확대보기
이미지 확대보기 한성희기사 모아보기 대표)이 터널 공사에 무인으로 작동하는 자율보행 로봇을 이용해 안전·품질 관리에 나선다.
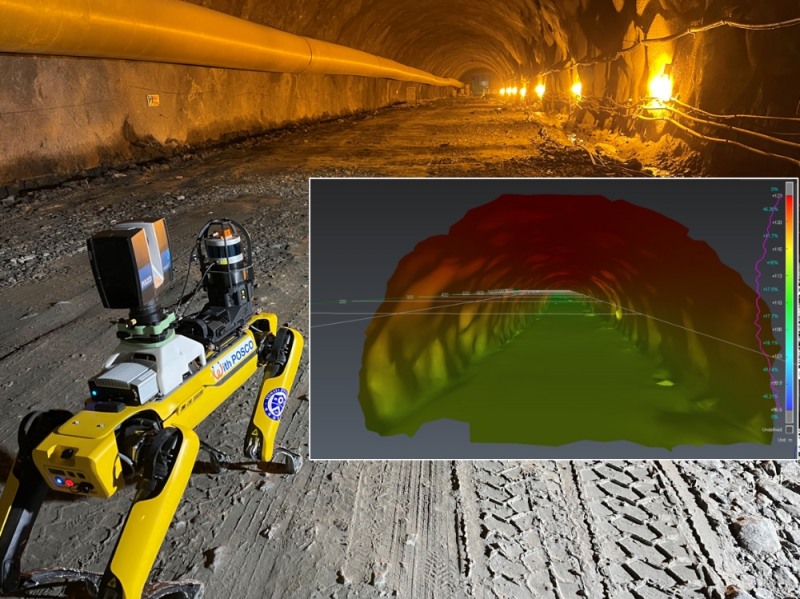
한성희기사 모아보기 대표)이 터널 공사에 무인으로 작동하는 자율보행 로봇을 이용해 안전·품질 관리에 나선다.포스코건설은 최근 자율보행 로봇에 레이저로 지형을 측정하는 LiDAR(Light Detection and Ranging)와 고성능 카메라를 탑재해 터널 내부의 시공 오류, 균열 등을 확인하기로 결정했다.
자율보행 로봇은 발파 작업 직후 인력이 투입되기 전에 낙하위험이 있는 암반 등의 위험요소를 사전에 확인할 수 있다. 이는 사고를 미연에 방지할 수 있을 것으로 기대된다.
포스코건설은 최근 ‘포천~화도 고속도로 4공구’ 현장의 터널 공사에 자율보행 로봇을 시범 적용해 그 효과를 입증한 바 있다.
포스코건설은 LiDAR를 탑재한 드론으로 스캔한 정보를 통해 지형·토공량 등의 사업 부지 정보를 제공하는 ‘Pos-Site’ 시스템을 개발했다. 정밀 설계와 시공 오류를 확인하는데 활용하고 있다. 측량 작업자 없이 경사면을 굴착하고 매설물이 있는 토지의 정밀한 굴착이 가능하도록 각종 계측기를 부착한 굴삭기를 투입하는 등 스마트컨스트럭션 기술을 현장에 적용 중이다.
관련기사
김관주 기자 gjoo@fntimes.com
데일리 금융경제뉴스 Copyright ⓒ 한국금융신문 & FNTIMES.com
저작권법에 의거 상업적 목적의 무단 전재, 복사, 배포 금지
가장 핫한 경제 소식! 한국금융신문의 ‘추천뉴스’를 받아보세요~





![[DQN] 조완석號 금호건설, 공공주택 전략으로 성장동력 기대감↑](https://cfnimage.commutil.kr/phpwas/restmb_setimgmake.php?pp=006&w=110&h=79&m=5&simg=20260616213113016460b372994c951245313551.jpg&nmt=18)
![[단독] 부산 에코델타시티 조성사업 현장서 교량 붕괴…2명 부상](https://cfnimage.commutil.kr/phpwas/restmb_setimgmake.php?pp=006&w=110&h=79&m=5&simg=20260509235556026990dd55077bc2118218214112.jpg&nmt=18)

![[6월 3주 청약] 수도권 민간 아파트 1곳만 청약…전국 3910가구 공급](https://cfnimage.commutil.kr/phpwas/restmb_setimgmake.php?pp=006&w=284&h=214&m=5&simg=20260612175200047740048b718333218144189132.jpg&nmt=18)
![‘미정산·회생’ 늪 빠진 유통가…티메프부터 홈플러스까지 [유통가 리스크 점검 ①]](https://cfnimage.commutil.kr/phpwas/restmb_setimgmake.php?pp=006&w=284&h=214&m=5&simg=20260606022535059880dd55077bc212411124362.jpg&nmt=18)

![서초구 '반포르엘' 33평, 12.3억 상승한 46.8억원에 거래 [일일 신고가]](https://cfnimage.commutil.kr/phpwas/restmb_setimgmake.php?pp=006&w=284&h=214&m=5&simg=2025061908193804321e41d7fc6c2183101242202.jpg&nmt=18)

![[현장] ‘상급종합병원 80% 장악’ 레몬헬스케어, 코스닥 출사표…“올해 242억 원 매출 달성”](https://cfnimage.commutil.kr/phpwas/restmb_setimgmake.php?pp=006&w=284&h=214&m=5&simg=20260617143116017290923defd0cc12116212969.jpg&nmt=18)
{kind=link}